|
|
| |
|
|
|
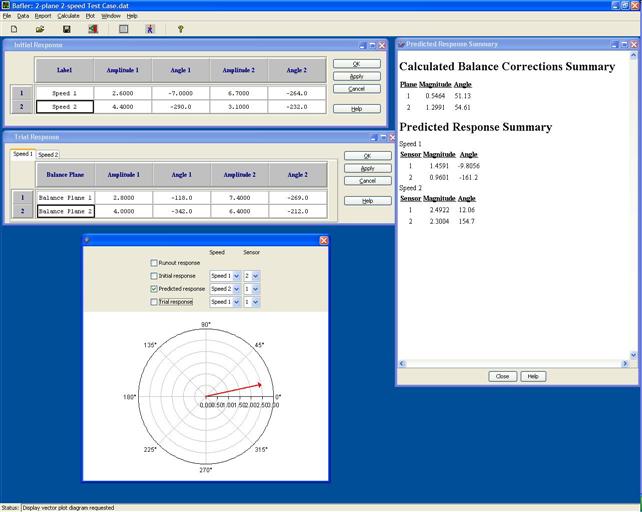
In addition to our main analysis programs FEMRDYN and iSTRDYN, we also offer two utility programs: BAFLER (BAlancing of FLExible
Rotors): For balancing a multi-plane rotor at several speeds, BAFLER determines correction values using a least-squares weighting factor approach. Program features include:
BAFLER is designed to allow quick data entry and easy review of all input and calculated quantities. There is no limit to the number of speeds, correction planes, or sensors, allowing very large systems to be balanced. For more information about this program, including pricing, please contact us.
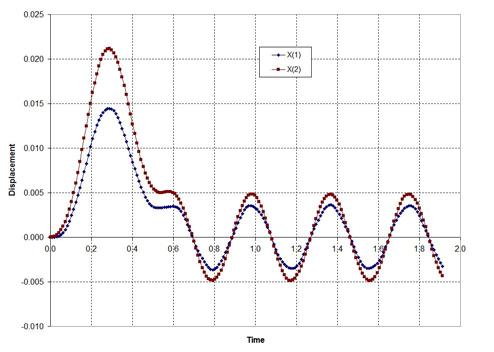
Integration Routines:
As a service to the engineering community, we are making
available two different Java programs that integrate a system of first
order differential equations. We use the algorithms in our rotor
dynamics codes. The programs are contained in a WinZip file, with
the following contents:
Both source files integrate a 2 DOF spring-mass problem by converting the 2nd order system to first order. You may use these codes free of charge, as long as you agree to the following: 1. You give credit to DynaTech Engineering as the original author. 2. You assume all liability for use of the software. To download these programs, click here.
|
| Copyright © 2016 by DynaTech Engineering, Inc. All rights reserved. |